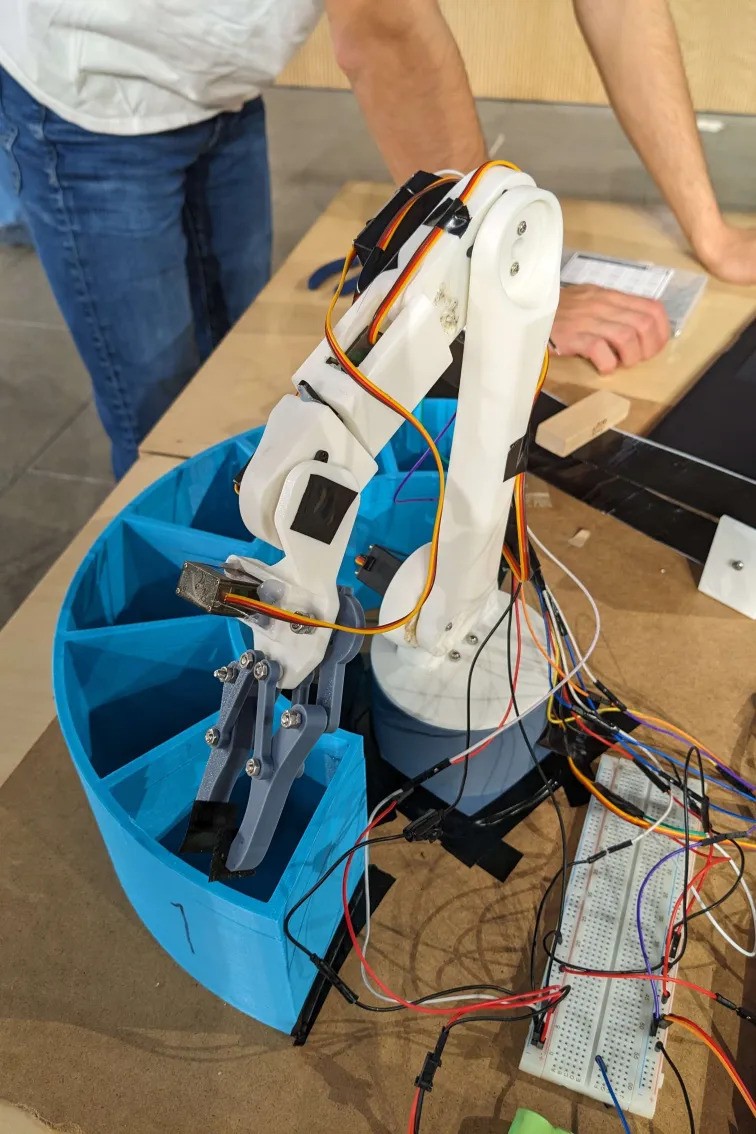
MedicArm
- Designed and 3-D printed modular robotic
arm with MG966R and MG90S servo motors,
utilizing SolidWorks for CAD design
- Implemented Google Speech Recognition API
to receive input and used IBM Watson TTS
service for intelligent replies
- Facilitated MongoDB database to add and edit
customer user-defined commands to control
arm movement
- Utilized serial communication between Arduino
and Raspberry Pi 5 to integrate AI model with
mechanical control
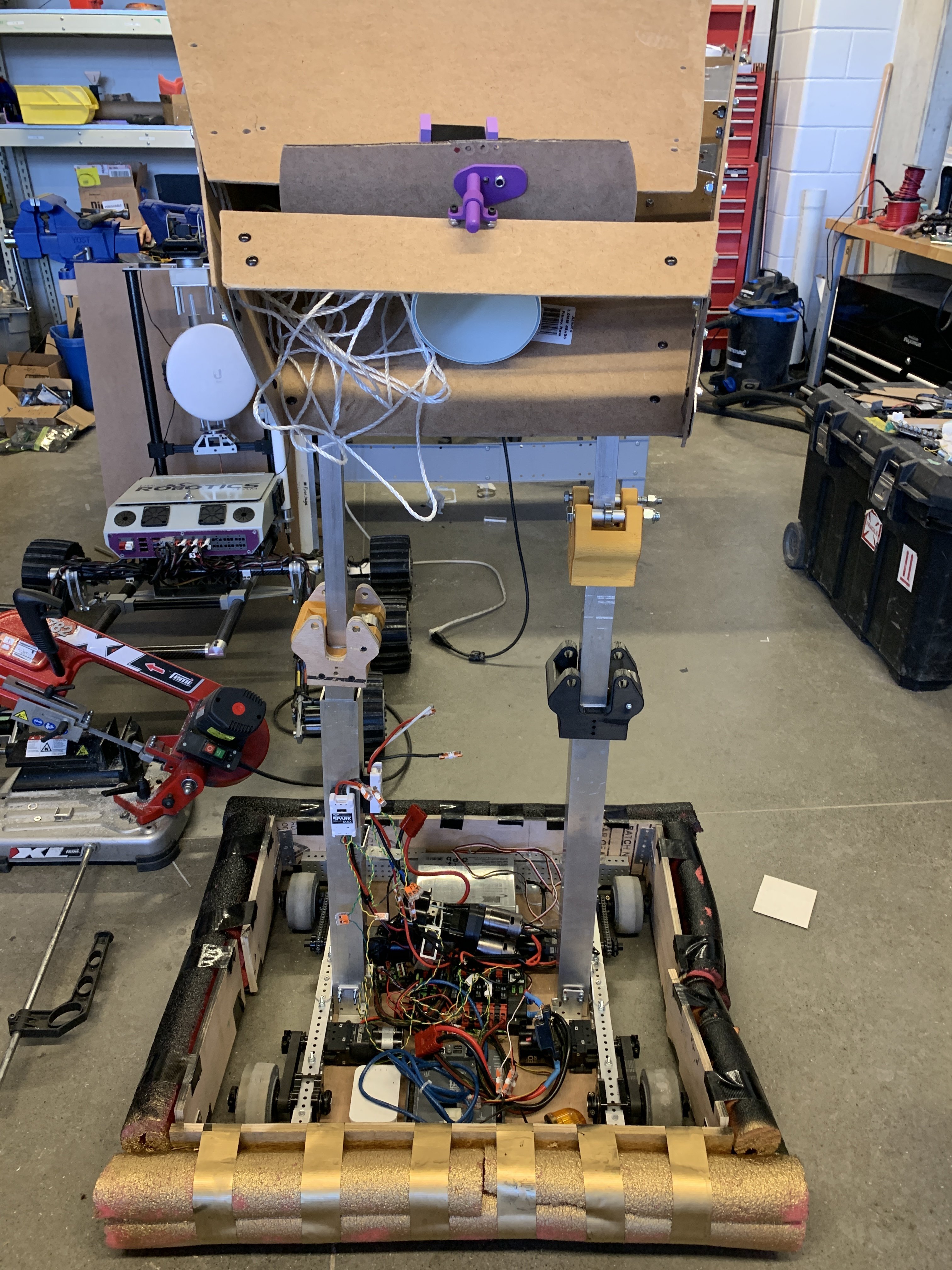
RI3D (Robot in 3 Days) Chassis
- Aided with assembly of robot made to complete FIRST
Robotics competition game for 2025
- Assembled drive train and arm mechanism for raising
and dropping game piece
- Collaborated with other students and used drill press,
chain tool, and horizontal band saw, to complete a remote
controlled prototype
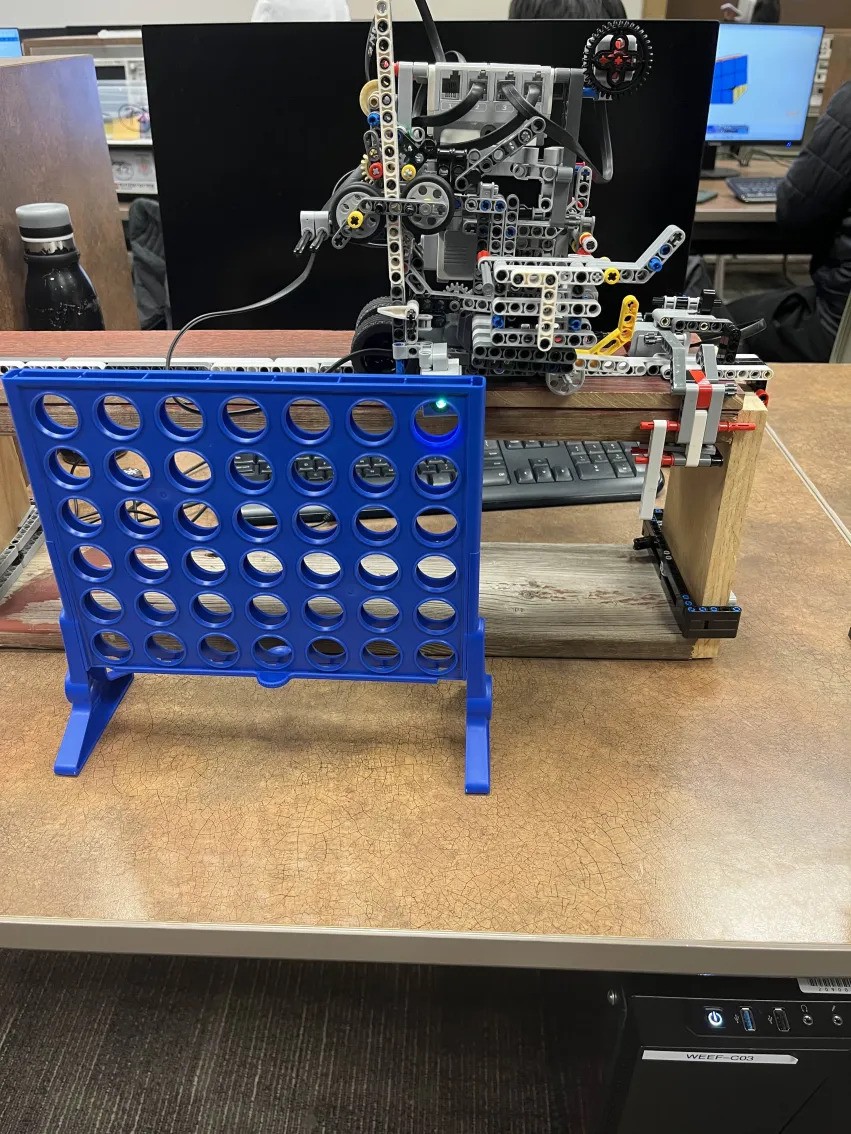
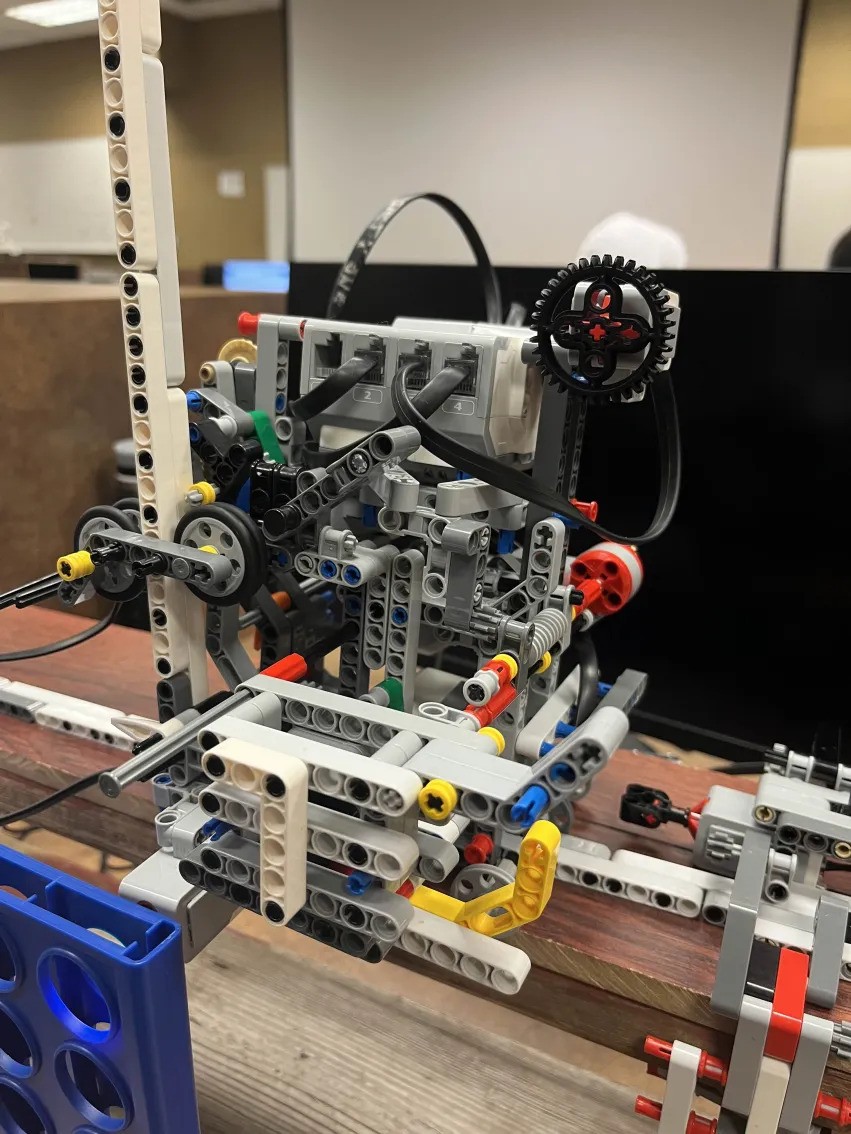
Connect 4 Playing Robot
- Designed and programmed a robot using LEGO Mindstorms
components and LEGO EV3 brick to hold Connect 4 tokens
- Read the state of a Connect 4 board, and move around to play
the game
- Designed mechanisms for movement, token dropping, and color
sensor operation
- Collaborated with a team of four, and distributed programming
tasks to create a RobotC program that could control the robot
and make smart decisions about where to play
- Used 2D arrays extensively to create an algorithm from scratch
that could decide what the best move is based on the current state
of the board
- Presented ideas in formal presentation, and communicated the prototype
in a technical report
FPV Drone
- Soldered necessary components to flight controller and assembled body
of drone
- Installed and configured firmware on flight controller using Betaflight,
tuned motors with PID control and adjusted settings to optimize flight
performance
- Successfully performed RC transmitter and receiver binding, and adjusted
various controller settings
- Researched principles of video transmission in order to adjust channels
and power output from video transmitter
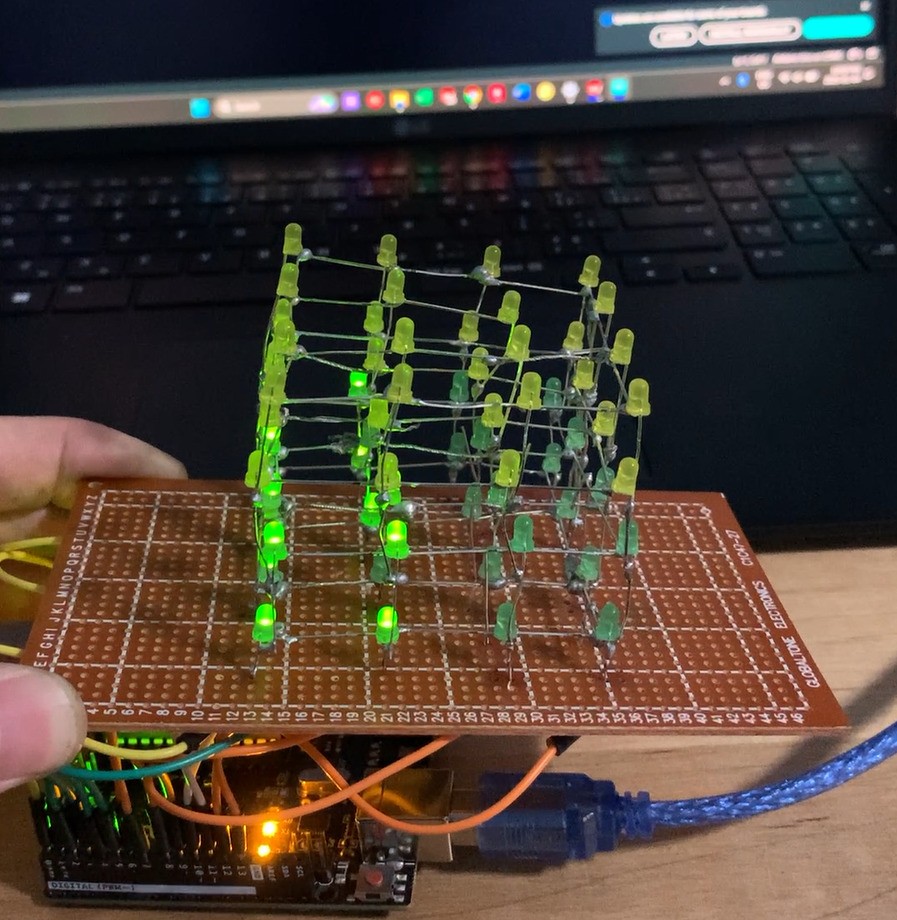
4x4x4 LED Cube
- Soldered 64 LEDs together to form 4 layers of 16, with each LED being
individually controlled by supplying power to an entire layer, but
setting individual columns to act as ground
- Navigated precise soldering between LEDs, and connecting the cube to a
prototype PCB
- Programmed a microcontroller with Arduino IDE to create light patterns